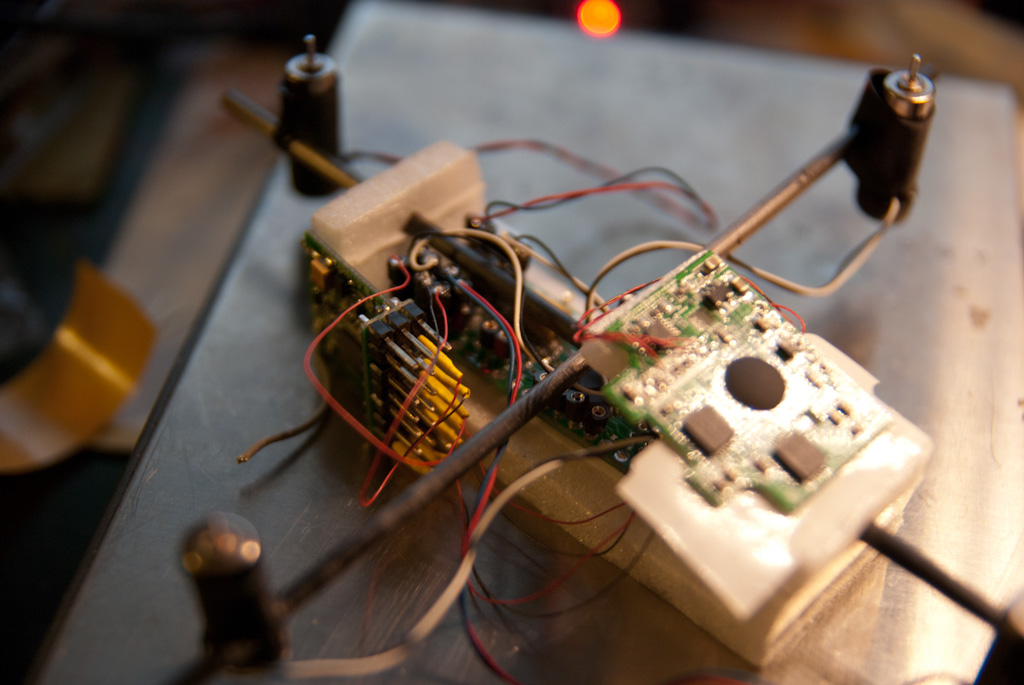
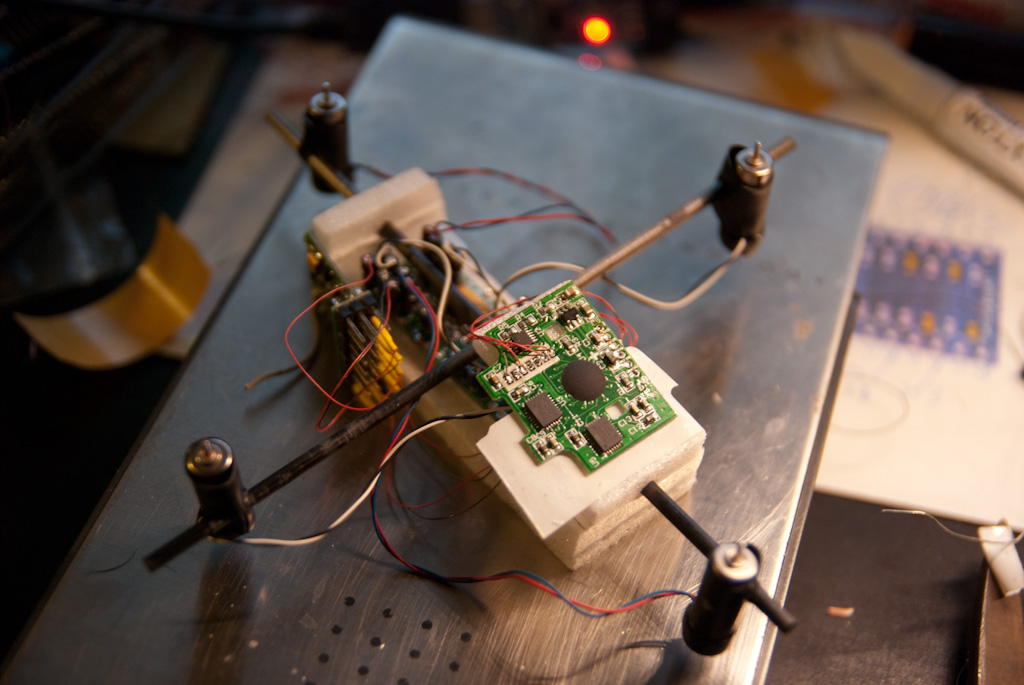
First integration tests for NanoQuad
Yesterday i finished the controller board prototype for the new NanoQuad i’m building.
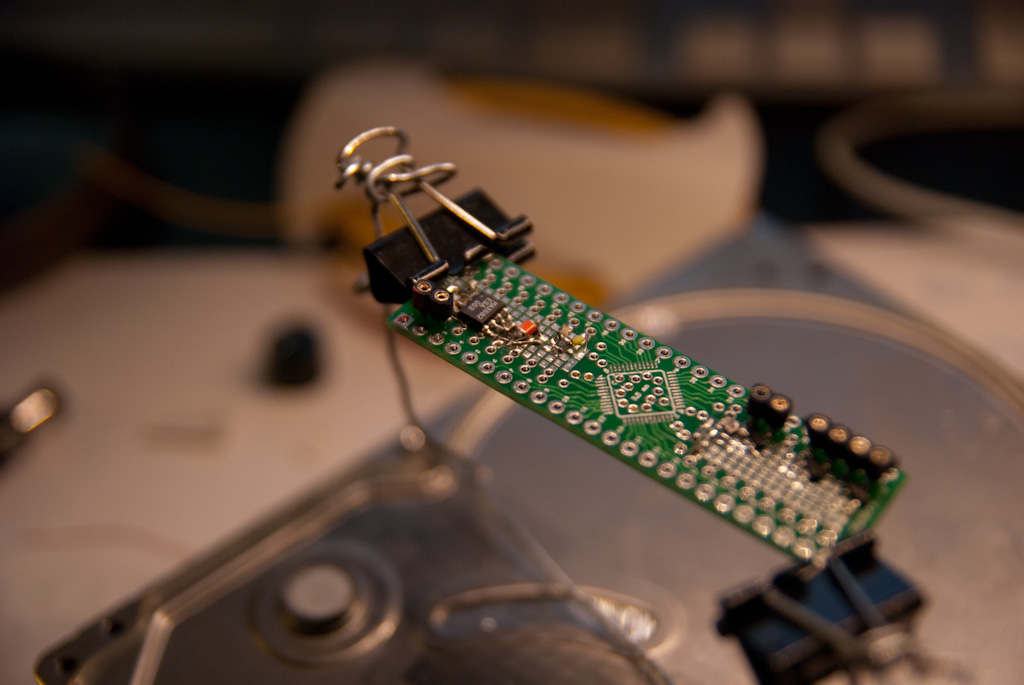
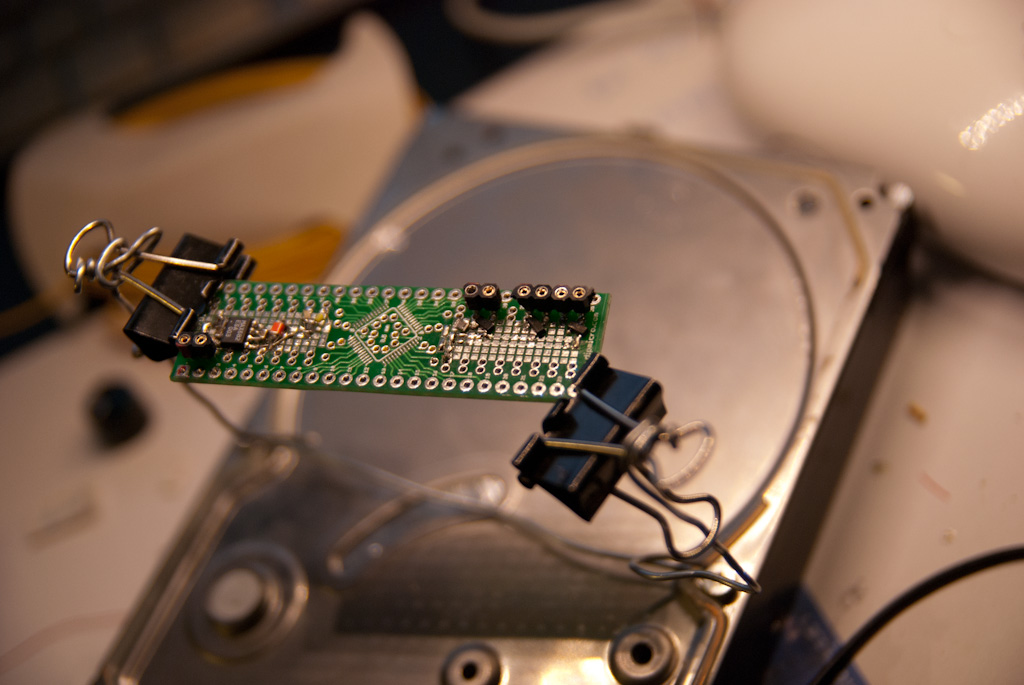
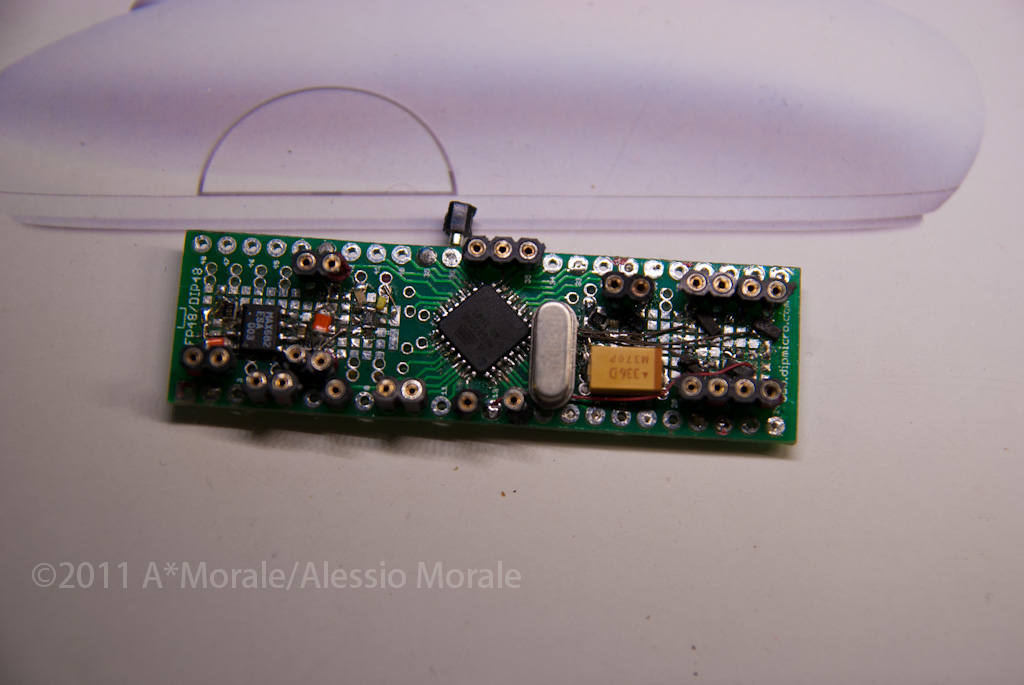
the board measures 60x18mm (it is a lqfp48 proto board i bought from dipmicro.com)
It contains:
- AVR ATMega328
- a max682 to raise the single lipo (4V to 3V) supply to 5V;
- 4 SI2304 N Mosfet used to power the brushed motors;
In this first phase i’ll control it using a DSM2 compatible Six channel radio from HobbyKing.
The gyro is simply a WiiMotion+ board.
Future versions of the quad will implements:
- Bluetooth connection and remote control instead of the DMS2 Radio;
- Smaller ITG3200 Gyro board;
The bluetooth radio will connect wirelessy the nanoquad to a controller board that contains an lcd, an atmega8, a bluetooth module and a port for an wii classic controller to be used to drive the quad.
The lcd will make able to change parameters and for a simple “telemetry”.
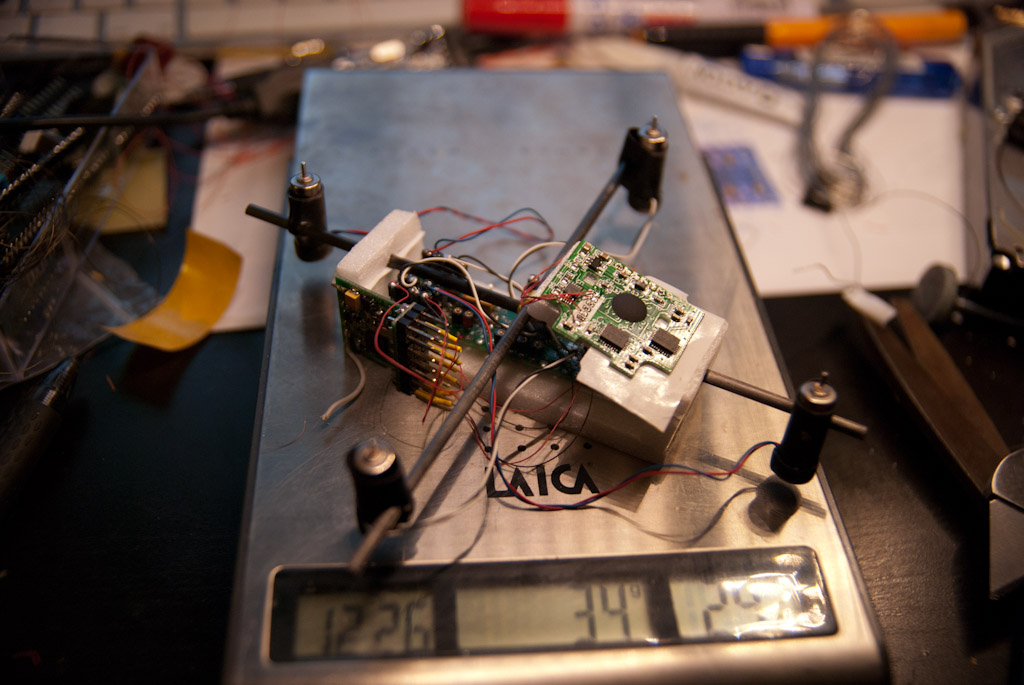
Here are some pictures (unfortunately i missed the finished controller board alone).
youtube: [First NanoQuad integration test](http://www.youtube.com/watch?v=7yxQ0K3MH50)
Update 24 March 2011: here is the MultiWii (thanks To Alexinparis ) software modified to drive directly four mosfet to power brushed motors (be aware, the software was only used to test the setup, never flyed, so use at you own risk.)
Alessio Morale
MULTICOPTERS
Multicopter