uNav2
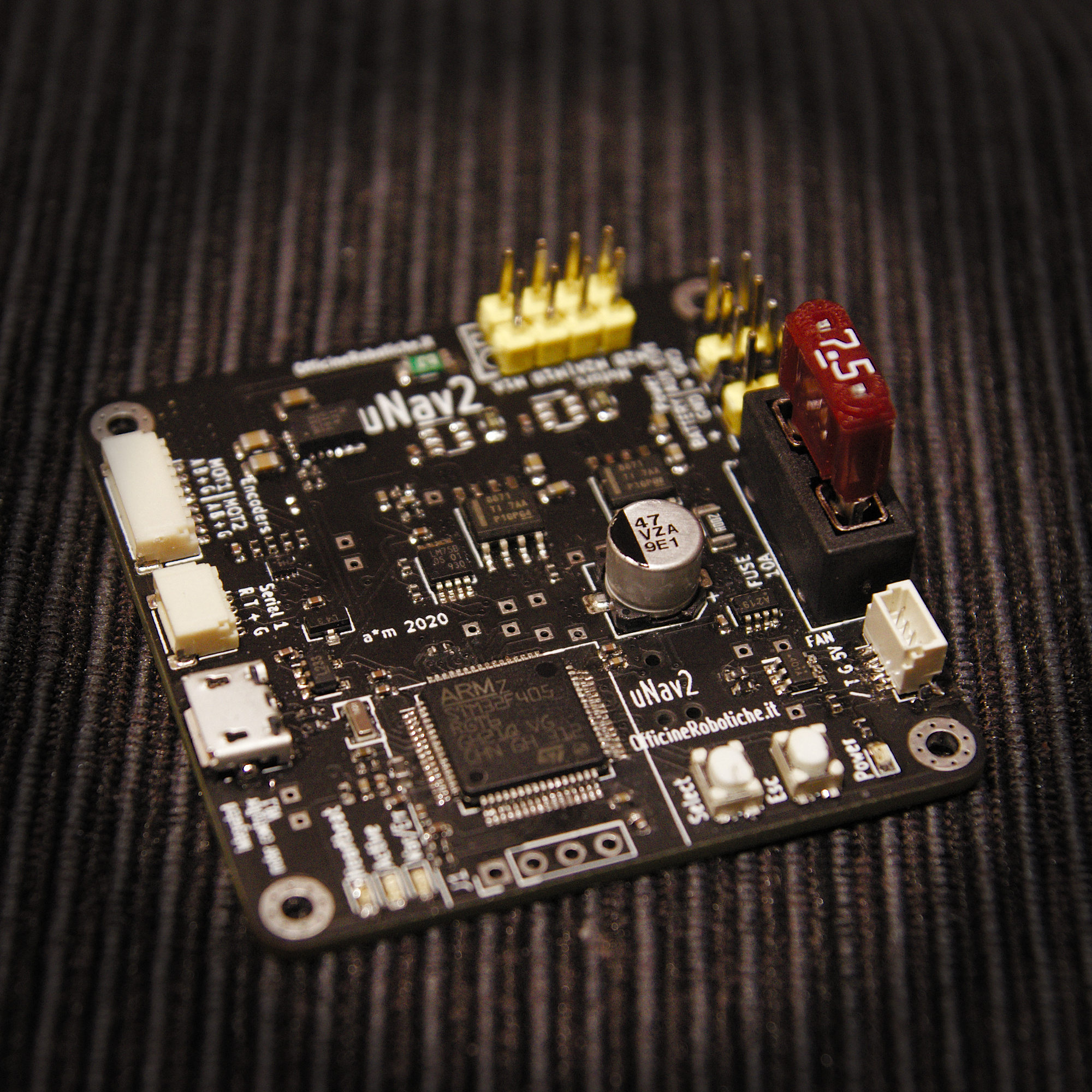 During the last few weeks I wanted to take a break from coding and I moved to the “drawing board” (KiCad 🙂 ) to design a prototype board for the STM32 based uNav board. uNav is a motor controller board that integrates with ROS and was was initially based on...
Read More ›
During the last few weeks I wanted to take a break from coding and I moved to the “drawing board” (KiCad 🙂 ) to design a prototype board for the STM32 based uNav board. uNav is a motor controller board that integrates with ROS and was was initially based on...
Read More ›
Slammer
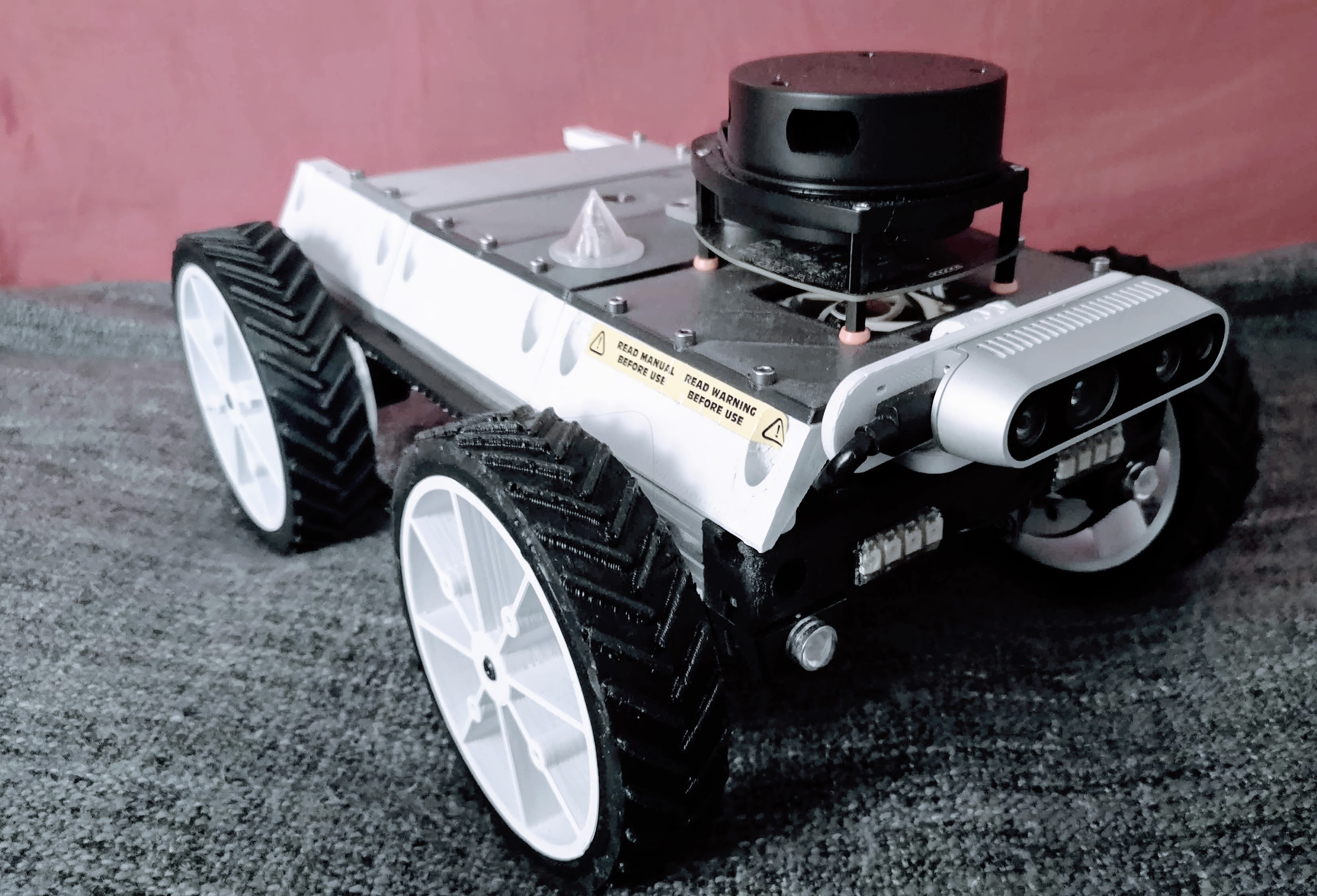 This project started a few years ago as my learning platform for robotic in general and ROS. At that time i was working mostly with drones, but I realised that testing things like mapping and navigation would have been much more harder and almost impossible indoor. For this reason, I...
Read More ›
This project started a few years ago as my learning platform for robotic in general and ROS. At that time i was working mostly with drones, but I realised that testing things like mapping and navigation would have been much more harder and almost impossible indoor. For this reason, I...
Read More ›