Building Docker images for Jetson Nano on your desktop
 In this article I will show the workflow I’m using to be able to build Docker containers to be deployed on a Jetson Nano using my desktop machine. Rationale QEMU Build images for aarch64 Issues What’s next Rationale For some time I was looking at a simple, repeatable solution to...
Read More ›
In this article I will show the workflow I’m using to be able to build Docker containers to be deployed on a Jetson Nano using my desktop machine. Rationale QEMU Build images for aarch64 Issues What’s next Rationale For some time I was looking at a simple, repeatable solution to...
Read More ›
docker · jetson · nvidia
Sensors and multifunctional light for Slammer
 In the last few day I reviewed the design of the top and incorporated a few devices in it: A BNO055 IMU and its USB/Serial; An uBlox GPS and its USB/Serial (I want to play with its doppler based velocity output that used to be of great help with drones);...
Read More ›
In the last few day I reviewed the design of the top and incorporated a few devices in it: A BNO055 IMU and its USB/Serial; An uBlox GPS and its USB/Serial (I want to play with its doppler based velocity output that used to be of great help with drones);...
Read More ›
slammer
More Articles
- More ›
NVidia JetRacer
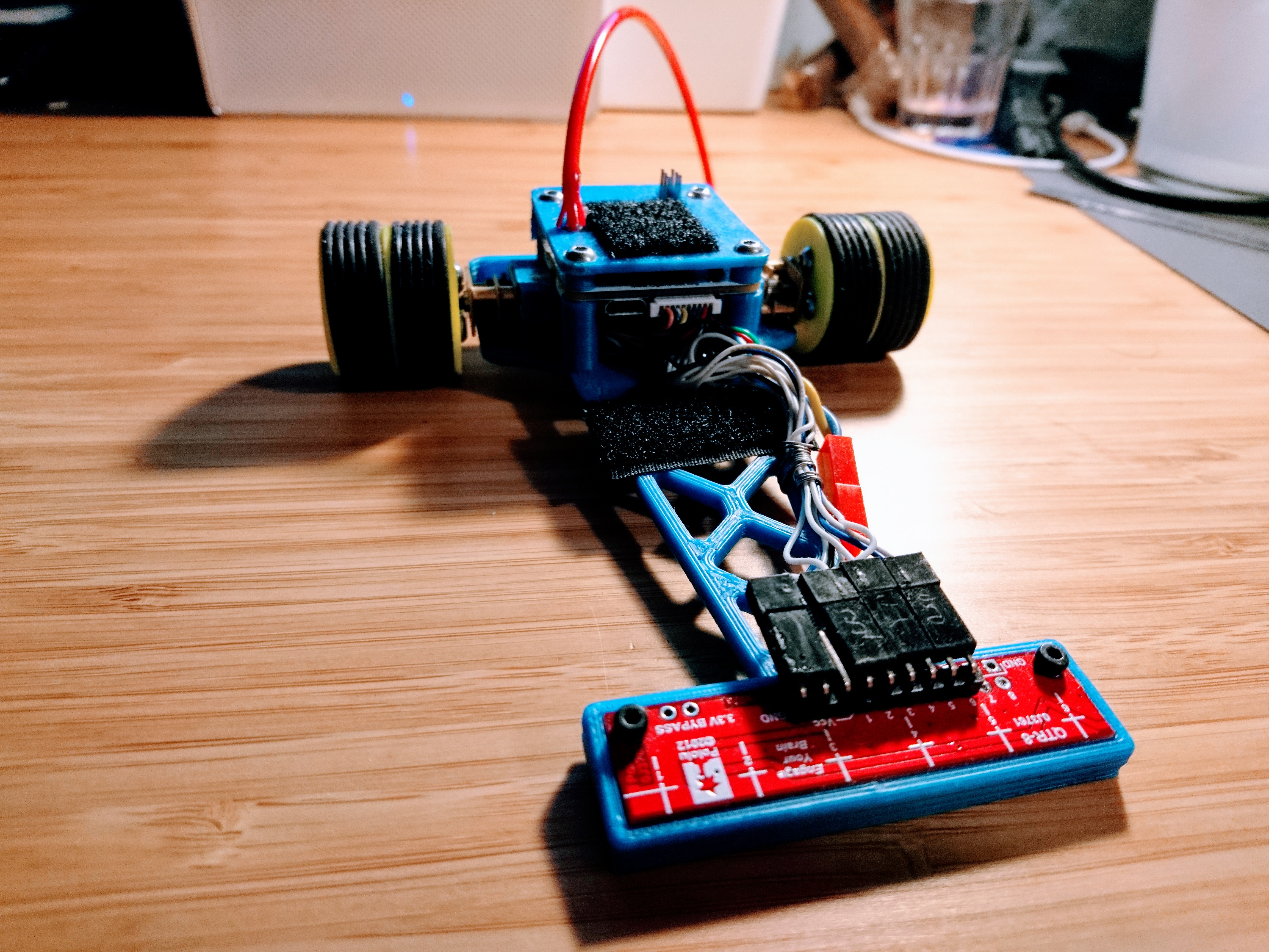
 Introduction Power supply/monitor Remote control Conclusions Introduction Some days ago I started this adventure with JetRacer.There were a few things that I didn’t particularly like from the original design, mainly the fact that Jetson is powered from a USB powerbank (with the additional disadvantages of carrying a lot more weight,...
Read More ›
Introduction Power supply/monitor Remote control Conclusions Introduction Some days ago I started this adventure with JetRacer.There were a few things that I didn’t particularly like from the original design, mainly the fact that Jetson is powered from a USB powerbank (with the additional disadvantages of carrying a lot more weight,...
Read More ›
ROS · Uncategorized
Setting up Realsense R200 on Odroid XU4 with ROS
 Update 1st may 2018: added a note to use realsense nodelet tag 1.8.1 and some patches to use ROS built from sources or GCC7. This post will guide you through the configuration of a Realsense R200 on Odroid XU4. There is nothing strictly related to this platform so they should...
Read More ›
Update 1st may 2018: added a note to use realsense nodelet tag 1.8.1 and some patches to use ROS built from sources or GCC7. This post will guide you through the configuration of a Realsense R200 on Odroid XU4. There is nothing strictly related to this platform so they should...
Read More ›
robot · ROS
Projects for Maker Faire 2017
 Pictures of some projects that will be brought to Maker Faire Rome 2017
Read More ›
Pictures of some projects that will be brought to Maker Faire Rome 2017
Read More ›
LibrePilot · linefollowers
uNav2
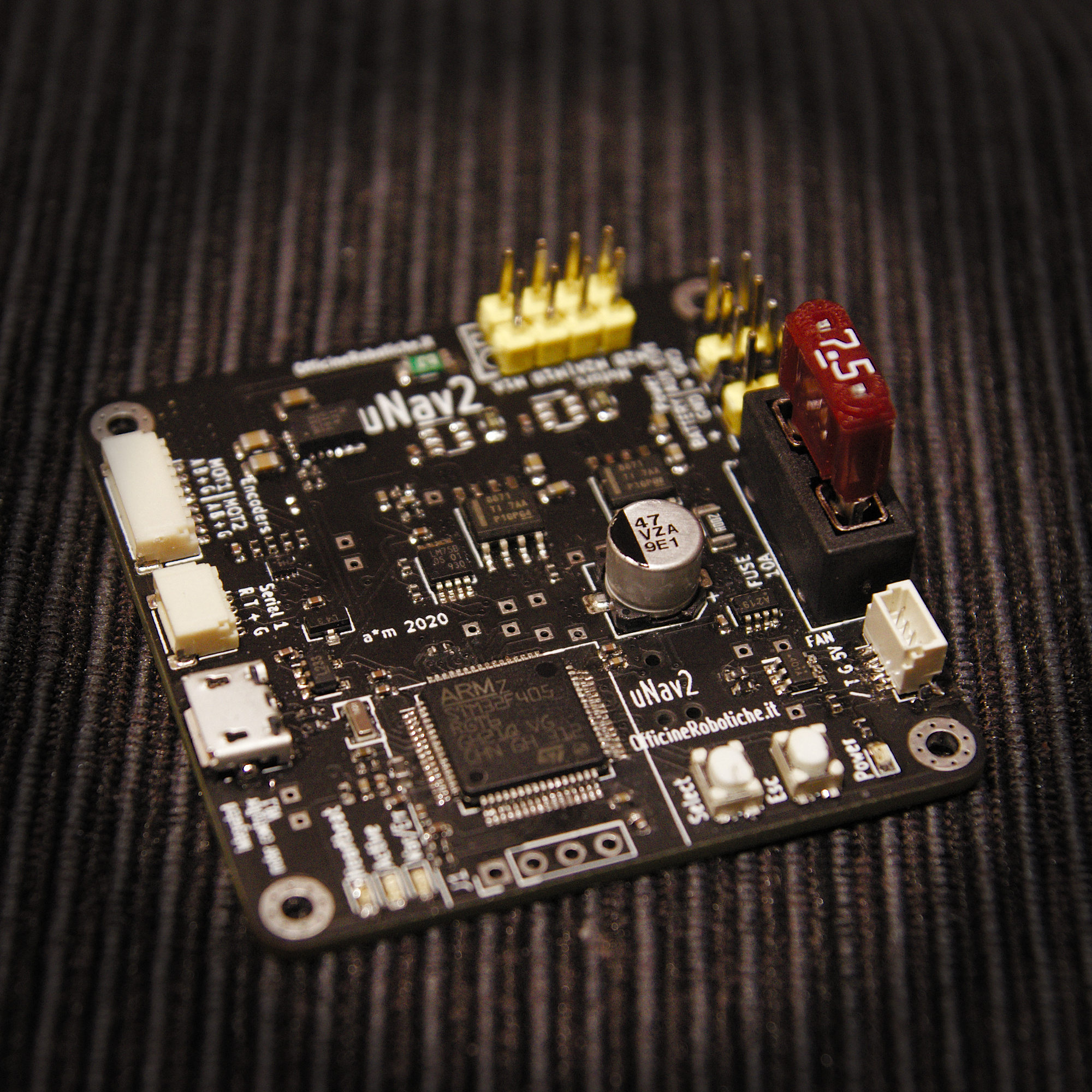 During the last few weeks I wanted to take a break from coding and I moved to the “drawing board” (KiCad 🙂 ) to design a prototype board for the STM32 based uNav board. uNav is a motor controller board that integrates with ROS and was was initially based on...
Read More ›
During the last few weeks I wanted to take a break from coding and I moved to the “drawing board” (KiCad 🙂 ) to design a prototype board for the STM32 based uNav board. uNav is a motor controller board that integrates with ROS and was was initially based on...
Read More ›
Slammer
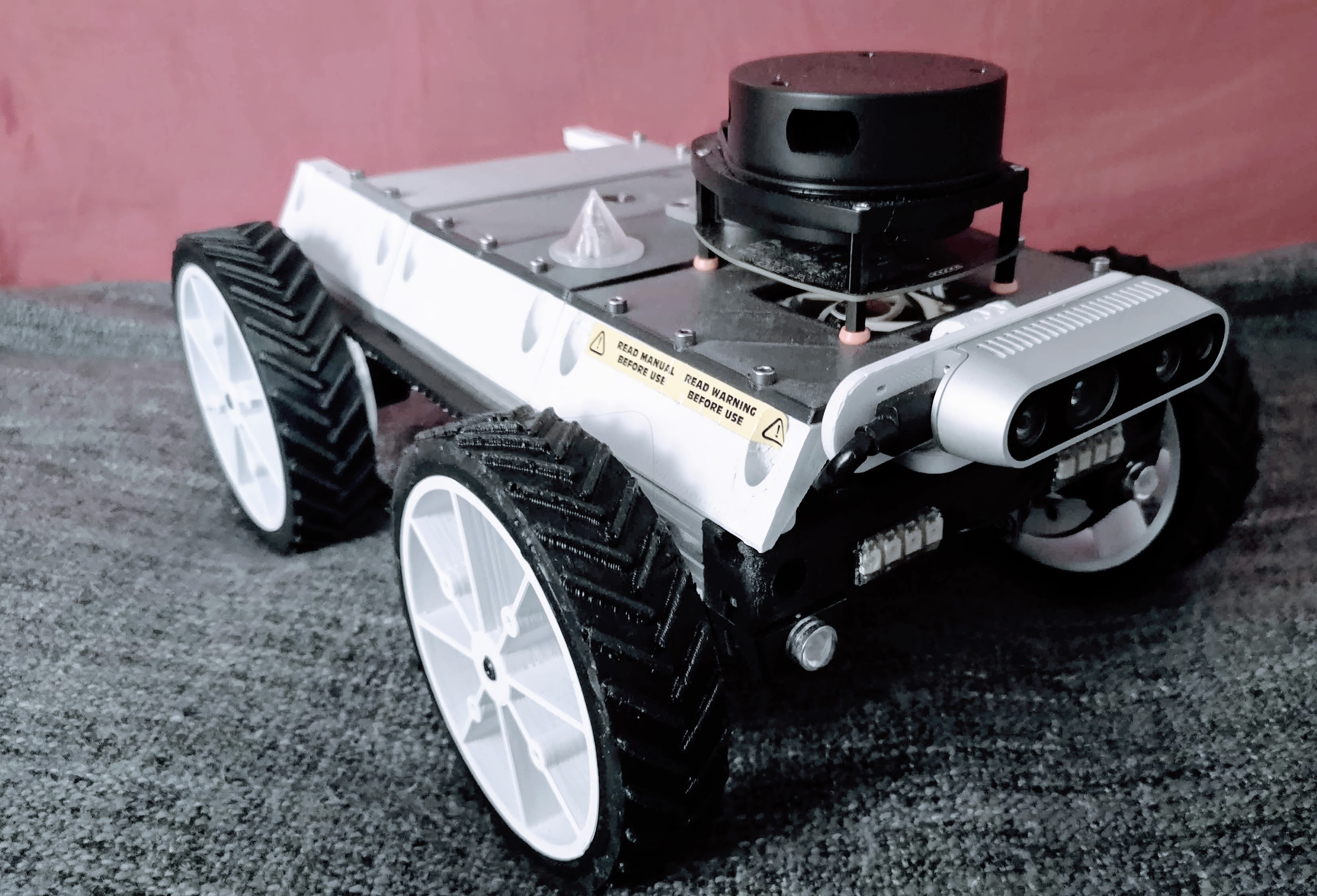 This project started a few years ago as my learning platform for robotic in general and ROS. At that time i was working mostly with drones, but I realised that testing things like mapping and navigation would have been much more harder and almost impossible indoor. For this reason, I...
Read More ›
This project started a few years ago as my learning platform for robotic in general and ROS. At that time i was working mostly with drones, but I realised that testing things like mapping and navigation would have been much more harder and almost impossible indoor. For this reason, I...
Read More ›
More Projects