"Padre Balistico" a (hopefully) fast line follower robot
Spending time with the guys at Officine Robotiche (a huge thank to Stefano Artigianato Robotico), I’ve discovered the world of line followers. Apparently simple robots whose ultimate goal is to, guess what, follow a line 🙂
This simple task involves several issues:
- reading sensors to determine the line displacement;
- employing a control algorithm to determine the movement vector;
- motor control;
- several other ancillary stuffs, like telemetry, etc;
Obviously mine will run LibrePilot 🙂 and that simplifies a lot of things as most of the component needed are either in place or needs minor rework.
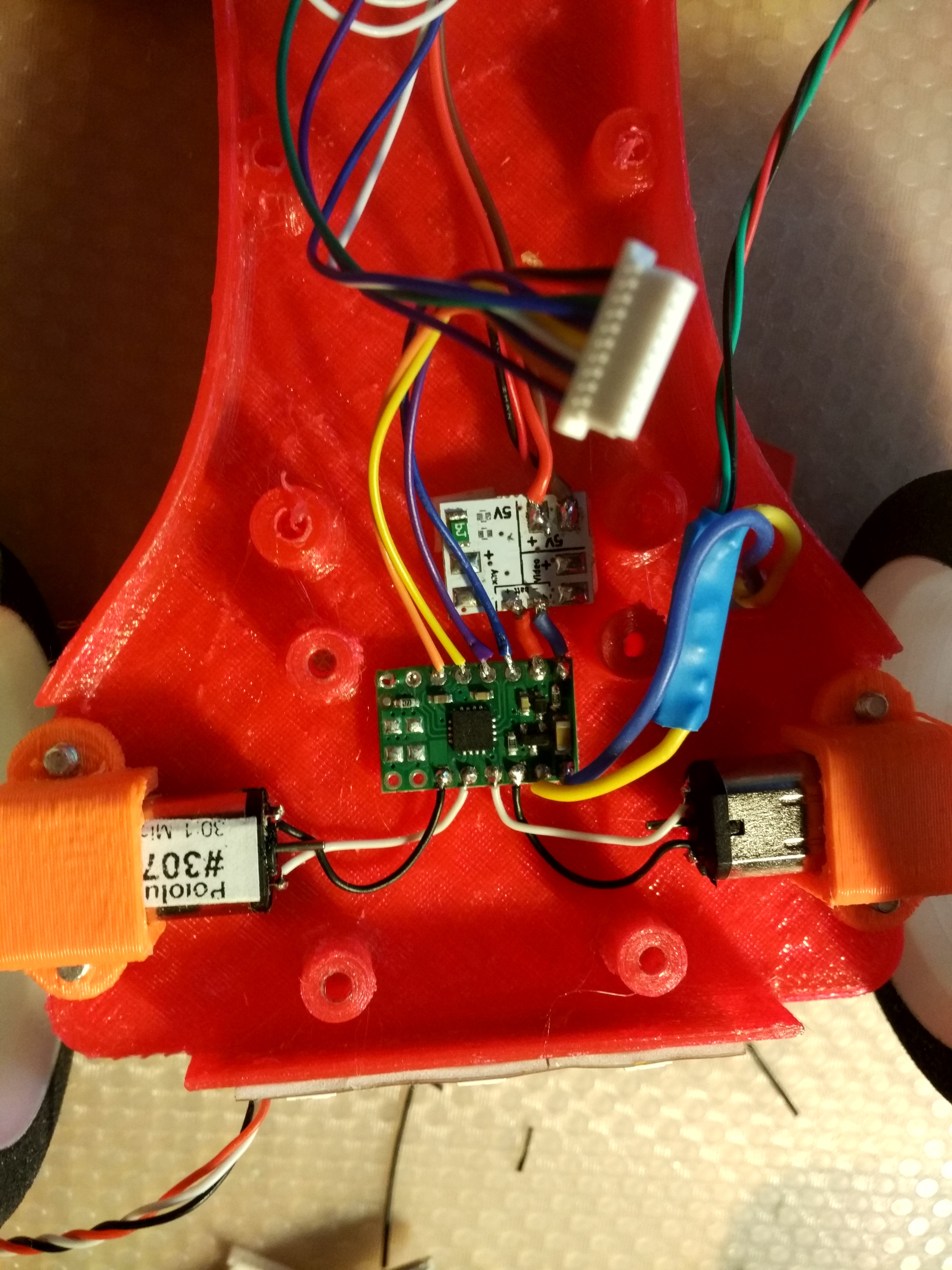
Unfortunately I had no enough time to make a custom board so I went for some ready stuffs for sensor board and motor driver. Thanks to Stefano ‘s suggestions and after fiddling with their datasheets I ended with the following component list:
- 1:30 gearmotor
- DRV8833 dual motor driver
- QTR-8RC Reflectance Sensor Array
- 12mm hex wheel adapters
- soft foam 1:12 RC Car wheels bought at a local store (yes, the ones with real people you can talk to 🙂 )
It will be based on OpenPilot Revolution board given it has plenty of I/O and RF module onboard, useful for tuning and telemetry.
I’ve also left some mounting holes that may host a NanoPI neo. One day it will be used for optical recognition for, i.e. better line speed planning.
This is the frame I made for this robot
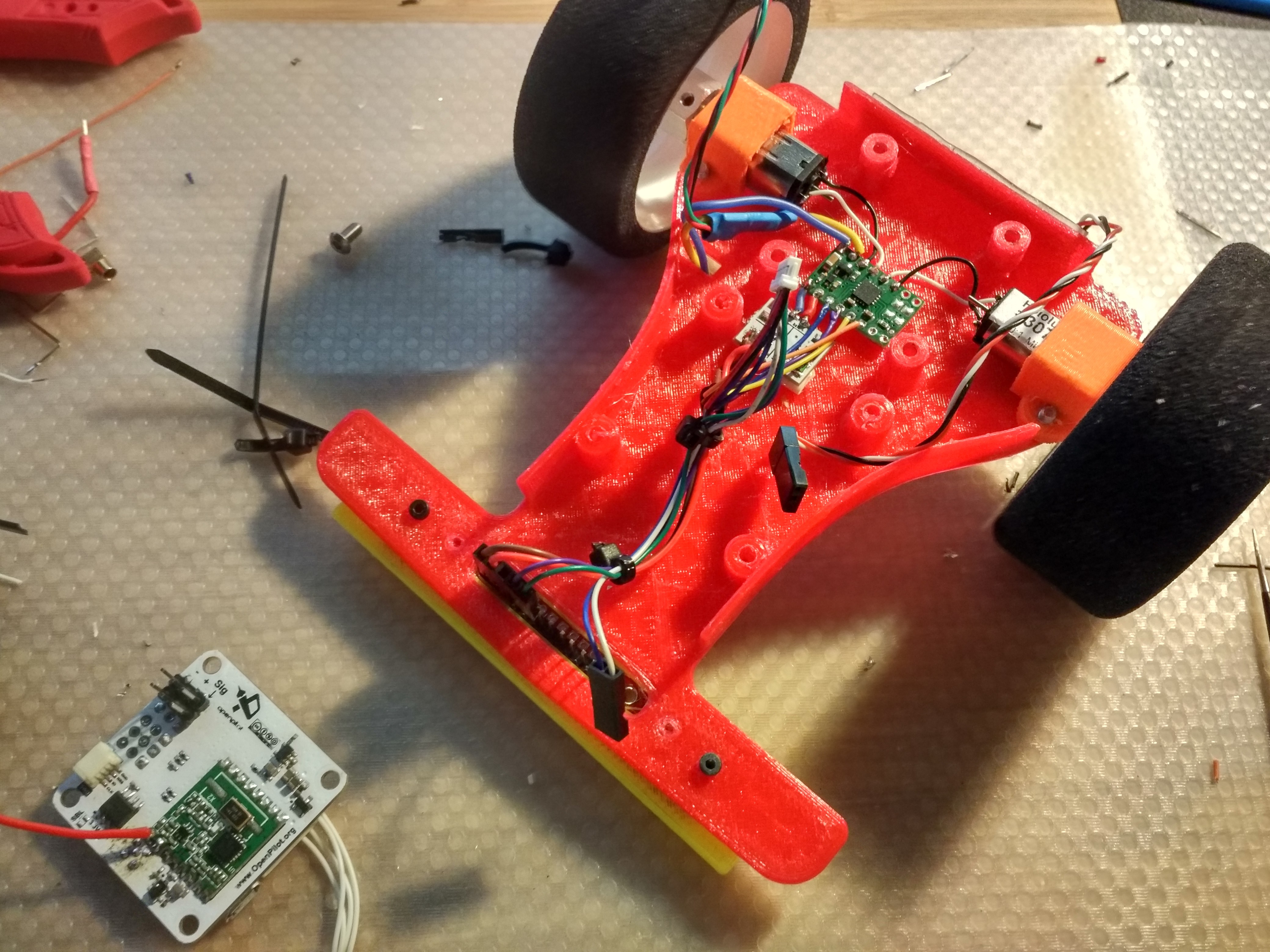
It is made of two parts, the main frame structure and sensor housing. It is available for download at Thingiverse (http://www.thingiverse.com/thing:1792422)
I used PETG for the main part and PLA (that is hard and have very low friction).

And here is a short video of the thing moving for the first time, using a standard RC transmitter (and related receiver) for control. It is already using gyro for yaw/trajectory stabilization
There is still a big to do list ahead, including (but not limited to) reversable motors handling and sensor reading.
LibrePilot had already almost everything needed. I added a specific target ( i called that roborevolution based on the revolution target, employing several changes needed to manage brushed motors and all the sensors needed). To have this first test working i only had to tweak the Servo motor drivers to handle higher frequencies and to increase the available resolution.
youtube: http://www.youtube.com/watch?v=Xo0Zb39PRaw
edit: here is the, still very hacky. source code i ‘m working on
edit2: and it works 🙂 until i find some time for a new update post, here are two videos of its first tests
youtube: http://www.youtube.com/watch?v=EWf0fa_k2FA
After a bit of tuning 🙂
youtube: https://www.youtube.com/watch?v=JDx6UnxeB-w