uNav2
During the last few weeks I wanted to take a break from coding and I moved to the “drawing board” (KiCad 🙂 ) to design a prototype board for the STM32 based uNav board. uNav is a motor controller board that integrates with ROS and was was initially based on PIC32. Some time ago I started to rewrite an STM32 version of it, using some generic dev board and it is currently “moving” my rover Slammer.
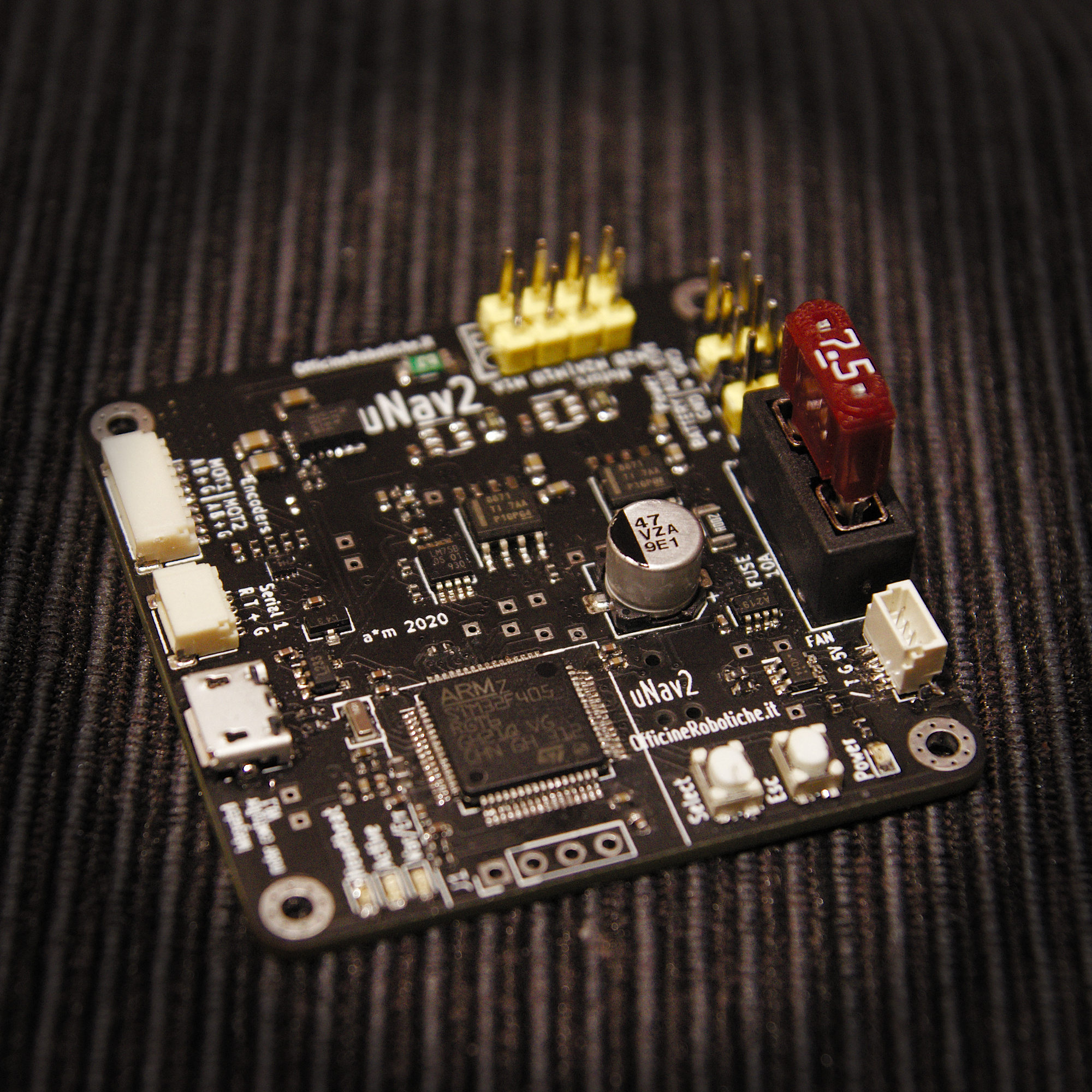
This is the first iteration of test hardware for uNav2.
The board includes a STM32F405 and two DRV8871 drivers. It supports motor current feedback using two INA186 and global battery current/voltage monitor using an INA219. Additionally there is an LM75 temperature monitor ic, a fan output and switching supply for 5V to power the board and the motor encoders.
This is the link to the repository, there are a few issues (i’m adding them to the GitHub project to keep track of all changes needed)
And here is the link to Interactive BOM (built with the awesome InteractiveHtmlBom plugin)
The initial tests are ok so far. Hopefully i can post some further update very soon.