
 In the last few day I reviewed the design of the top and incorporated a few devices in it: A BNO055 IMU and its USB/Serial; An uBlox GPS and its USB/Serial (I want to play with its doppler based velocity output that used to be of great help with drones);...
Read More ›
In the last few day I reviewed the design of the top and incorporated a few devices in it: A BNO055 IMU and its USB/Serial; An uBlox GPS and its USB/Serial (I want to play with its doppler based velocity output that used to be of great help with drones);...
Read More ›
slammer
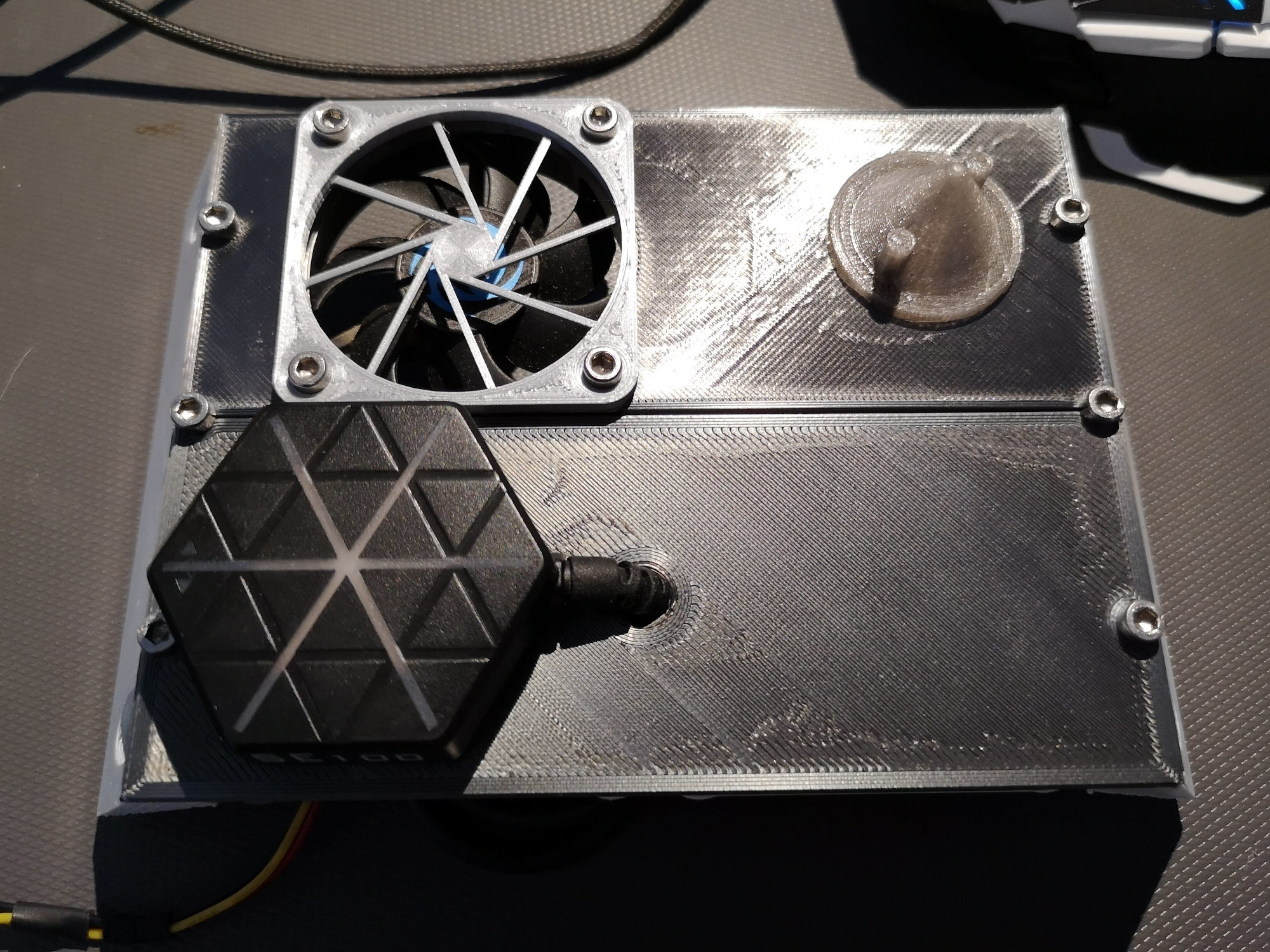
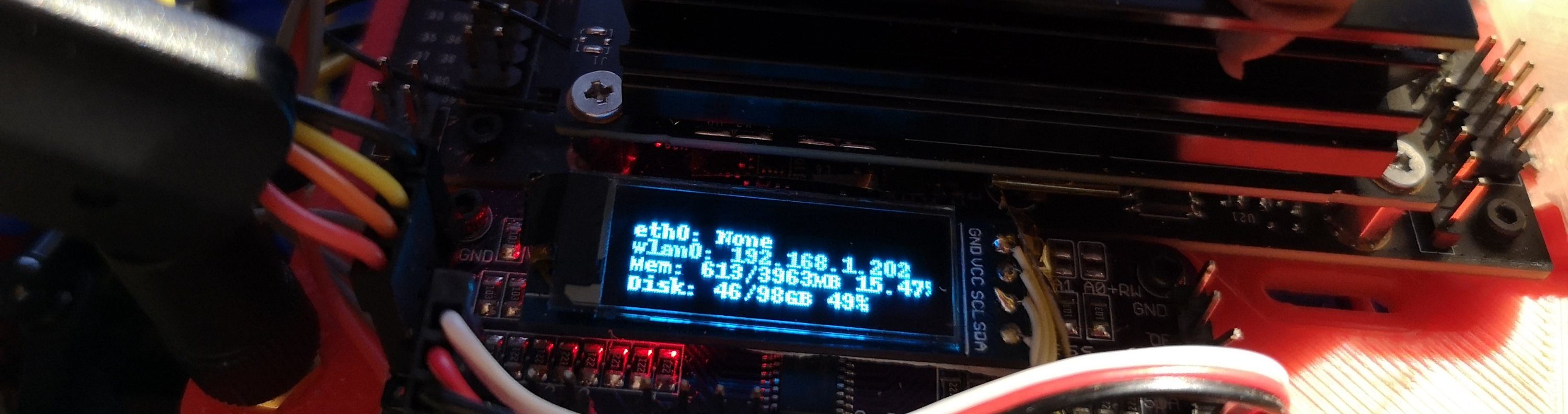 Introduction Power supply/monitor Remote control Conclusions Introduction Some days ago I started this adventure with JetRacer.There were a few things that I didn’t particularly like from the original design, mainly the fact that Jetson is powered from a USB powerbank (with the additional disadvantages of carrying a lot more weight,...
Read More ›
Introduction Power supply/monitor Remote control Conclusions Introduction Some days ago I started this adventure with JetRacer.There were a few things that I didn’t particularly like from the original design, mainly the fact that Jetson is powered from a USB powerbank (with the additional disadvantages of carrying a lot more weight,...
Read More ›
ROS · Uncategorized
 Update 1st may 2018: added a note to use realsense nodelet tag 1.8.1 and some patches to use ROS built from sources or GCC7. This post will guide you through the configuration of a Realsense R200 on Odroid XU4. There is nothing strictly related to this platform so they should...
Read More ›
Update 1st may 2018: added a note to use realsense nodelet tag 1.8.1 and some patches to use ROS built from sources or GCC7. This post will guide you through the configuration of a Realsense R200 on Odroid XU4. There is nothing strictly related to this platform so they should...
Read More ›
robot · ROS
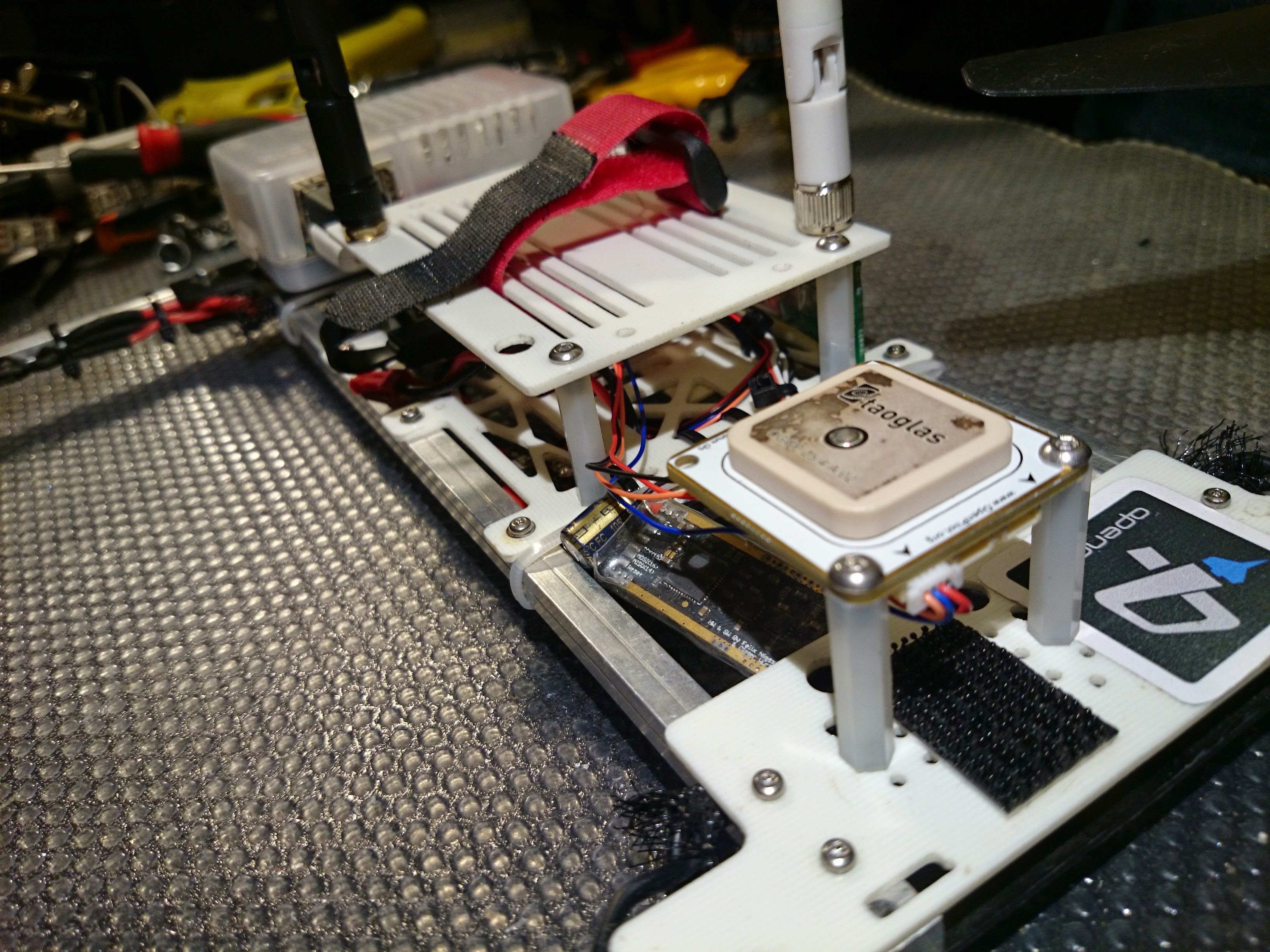 I’m shortly going to work integrating the OpenPilot telemetry with ROS. Main (long term) focus is indoor positioning and navigation. This is a quick mockup of the craft that will be used. Plates are going to be rebuilt to better host everything The reference platform is made by OpenPilot Revolution flight...
Read More ›
I’m shortly going to work integrating the OpenPilot telemetry with ROS. Main (long term) focus is indoor positioning and navigation. This is a quick mockup of the craft that will be used. Plates are going to be rebuilt to better host everything The reference platform is made by OpenPilot Revolution flight...
Read More ›
Multicopters · OpenPilot
subscribe via RSS